Here is the small program I wrote to implement the use of an ultrasonic SR04 sensor on the Gamebuino Meta. Feel free to reuse and modify this code as much as you want to implement your own functionnalities.
#include <Gamebuino-Meta.h>
#define US_PIN_INPUT_ECHO 3 // attach pin D3 Arduino to pin Echo of HC-SR04
#define US_PIN_OUTPUT_TRIG 4 //attach pin D4 Arduino to pin Trig of HC-SR04
float f32_distance = 0; // compute filter to stabilize distance measure
void setup()
{
// put your setup code here, to run once:
gb.begin();
pinMode( US_PIN_OUTPUT_TRIG, OUTPUT); // Sets the trigPin as an OUTPUT
pinMode( US_PIN_INPUT_ECHO, INPUT); // Sets the echoPin as an INPUT
digitalWrite(US_PIN_OUTPUT_TRIG, LOW); // Set the trigPin to LOW level (=0)
}
float ultrasonic_measure() {
digitalWrite(US_PIN_OUTPUT_TRIG, HIGH);
delayMicroseconds(10); // Sets the trigPin HIGH (ACTIVE) for 10 microseconds
digitalWrite(US_PIN_OUTPUT_TRIG, LOW);
long duration = pulseIn(US_PIN_INPUT_ECHO, HIGH, 20000); // Reads the echoPin, returns the sound wave travel time in microseconds
duration = duration * 144 / 100; // fix pulse measure : add 44% to pulseIn() return value to get correct time in microseconds
// Calcul de la distance
long distance = duration * 0.034 / 2; // Compute distance from sound wave (Speed of sound wave divided by 2 for go and back)
f32_distance = f32_distance*.9 + 0.1 * distance; // filter for stable measure
return f32_distance;
}
void display_bar(float distance)
{
// Affichage des valeurs
gb.display.print( "Distance : ");
gb.display.println(f32_distance);
// display graphical progress bar
gb.display.drawRect(5, gb.display.height() - 15, gb.display.width() - 10, 10);
// fill the progress bar
int32_t i32_bar_len = (((distance + 0.5) * 100) / 50) * (gb.display.width()- 12) / 100;
gb.display.setColor(GREEN);
if(distance < 35)
{
gb.display.setColor(ORANGE);
}
if(distance < 15)
{
gb.display.setColor(RED);
}
gb.display.fillRect(6, gb.display.height() - 14, i32_bar_len, 8);
}
void loop() {
while ( gb.update() ) ;
float d = ultrasonic_measure();
if ( d > 50 ) d = 50;
if ( d < 5 ) d = 5;
gb.display.clear();
display_bar(d);
}
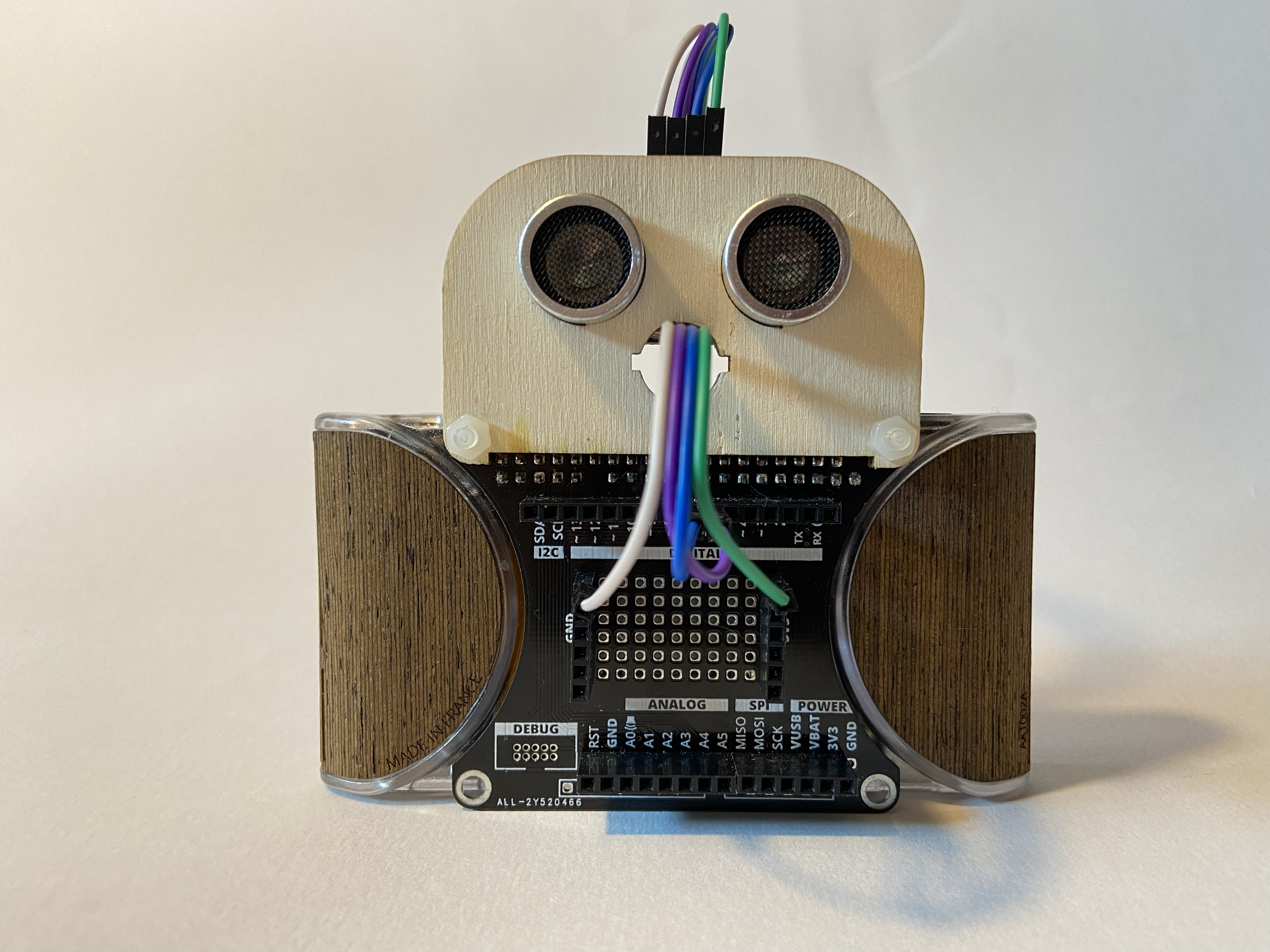
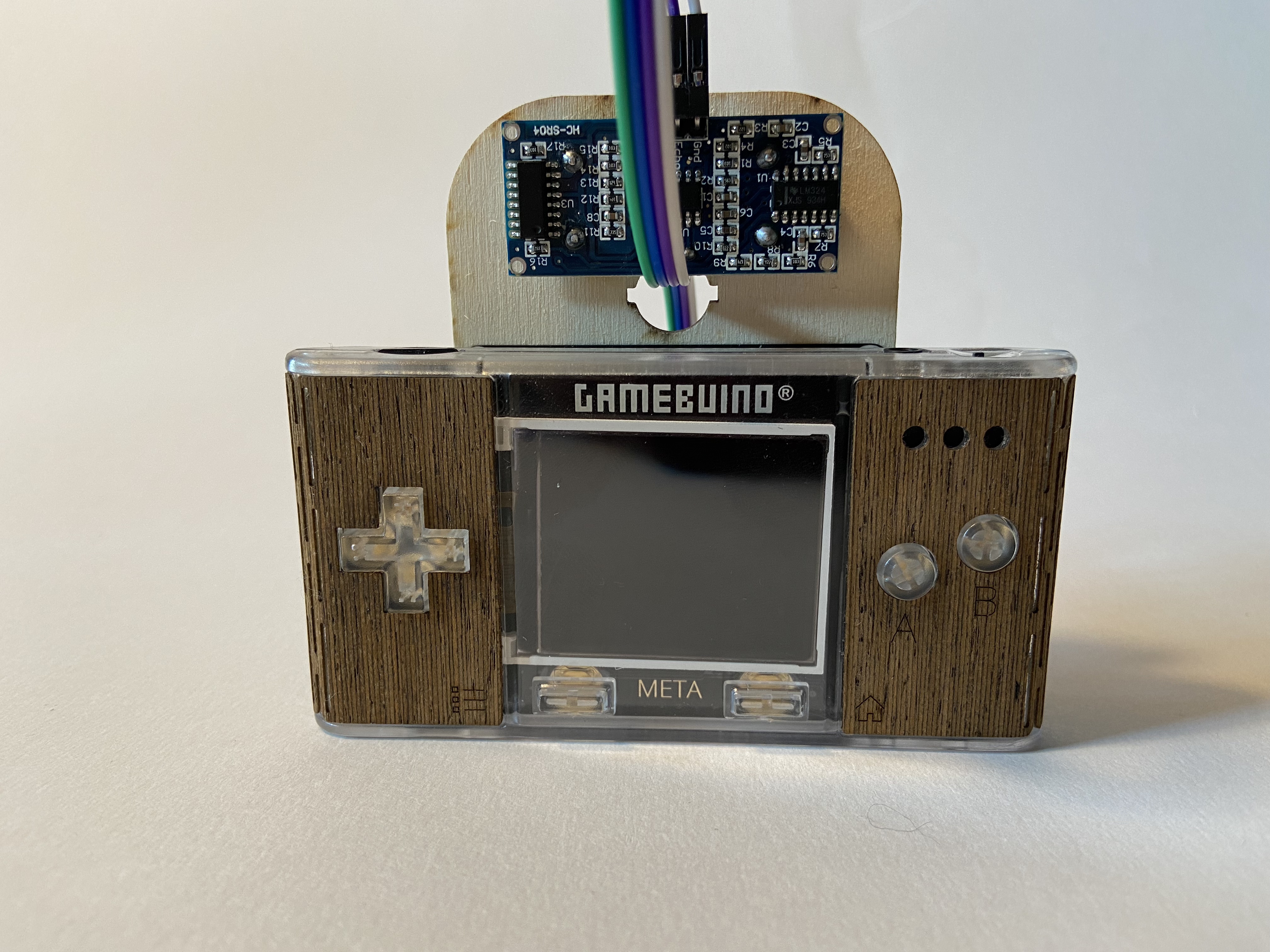
Howto connect ?
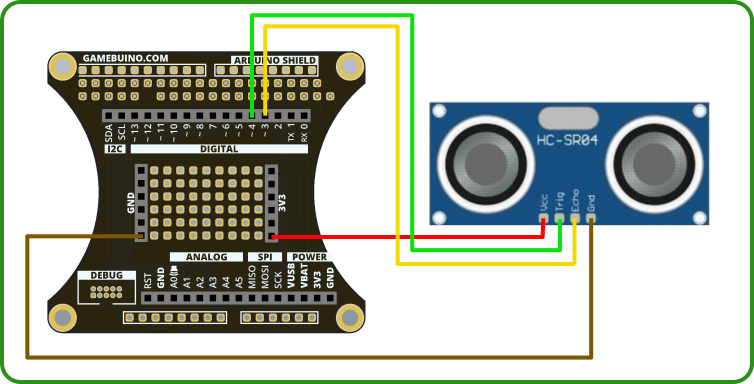
| SR04 | Backpack | Couleur | Description |
|---|---|---|---|
| TRIG | 4 | GREEN | Trig output (start measure) |
| ECHO | 3 | YELLOW | Echo signal input |
| VCC | 3V3 | RED | 3v3 sensor power supply |
| GND | GND | BROWN | power ground |